sudo modprobe can sudo modprobe can_raw sudo modprobe mttcan
下一步是根据您的 CAN 总线和收发器的规格配置 CAN 控制器。这里我将 CAN 比特率设置为 500 Kbps,启用灵活数据速率 (FD),将有效负载比特率设置为 2 Mbps 并启用总线错误报告。如果您不确定所有这些设置,您可以设置该bitrate值并在此之后忽略其他选项。
sudo ip link set can0 type can bitrate 500000 \ dbitrate 2000000 berr-reporting on fd on sudo ip link set can1 type can bitrate 500000 \ dbitrate 2000000 berr-reporting on fd on
现在我们只需要启动 CAN 接口:
sudo ip link set up can0 sudo ip link set up can1
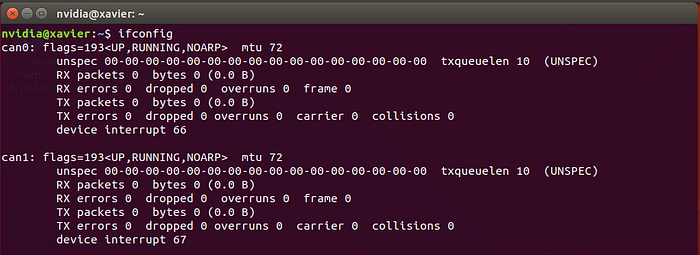
要检查 CAN 控制器是否已成功启用,请使用该ifconfig命令。can0在输出中,您应该能够看到can1您的网络设备,如下图所示:
要在系统启动时自动完成上述 CAN 控制器配置,enable_CAN.sh请在根目录中创建一个名为的文件并使其可执行:
touch /enable_CAN.sh chmod 755 /enable_CAN.sh
将以下行添加到此文件并保存。这些基本上与我们为配置 CAN 控制器而运行的命令相同。
#!/bin/bashsudo busybox devmem 0x0c303000 32 0x0000C400 sudo busybox devmem 0x0c303008 32 0x0000C458 sudo busybox devmem 0x0c303010 32 0x0000C400 sudo busybox devmem 0x0c303018 32 0x0000C458sudo modprobe can sudo modprobe can_raw sudo modprobe mttcan sudo ip link set can0 type can bitrate 500000 dbitrate 2000000 berr-reporting on fd on sudo ip link set can1 type can bitrate 500000 dbitrate 2000000 berr-reporting on fd on sudo ip link set up can0 sudo ip link set up can1

 wechat
wechat alipay
alipay